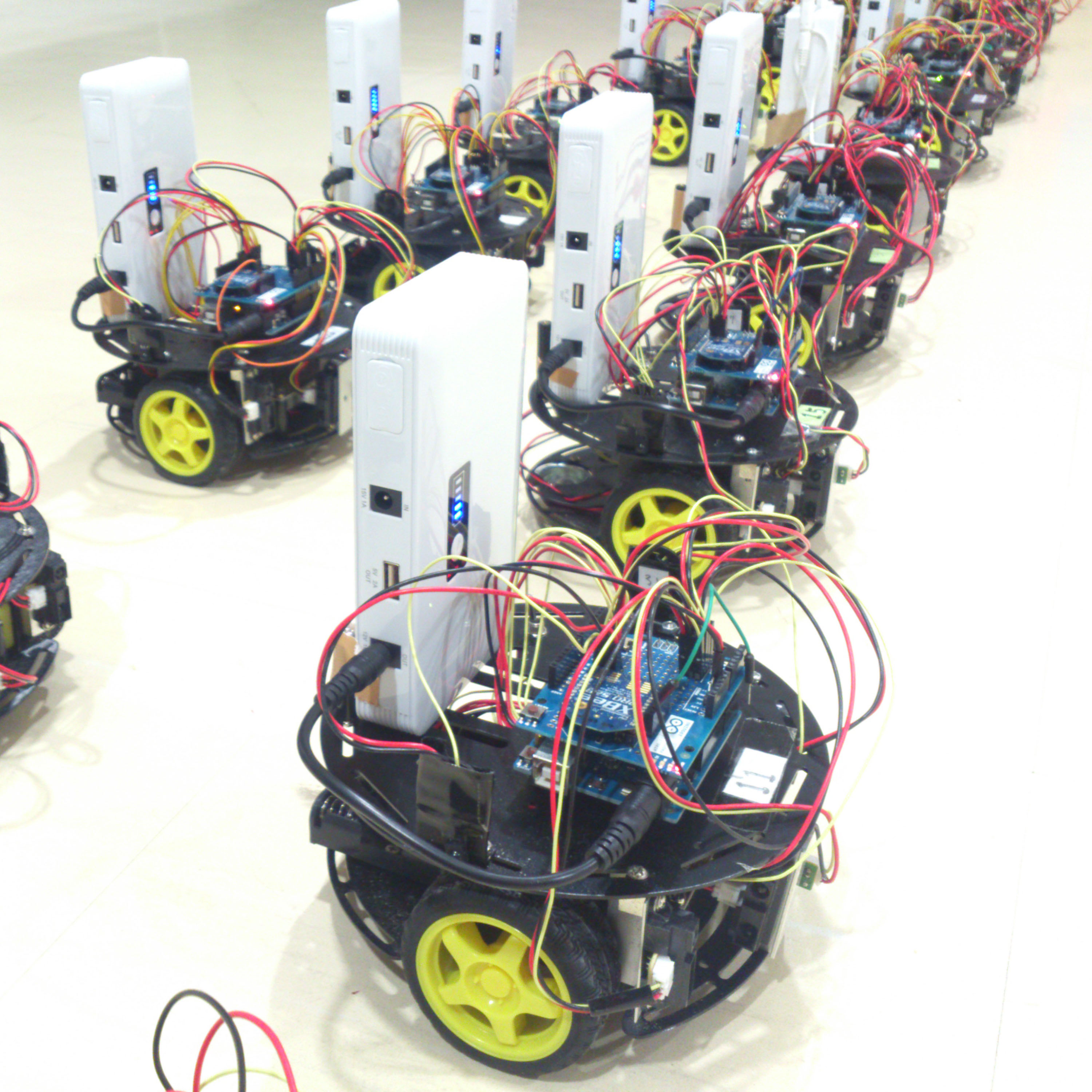
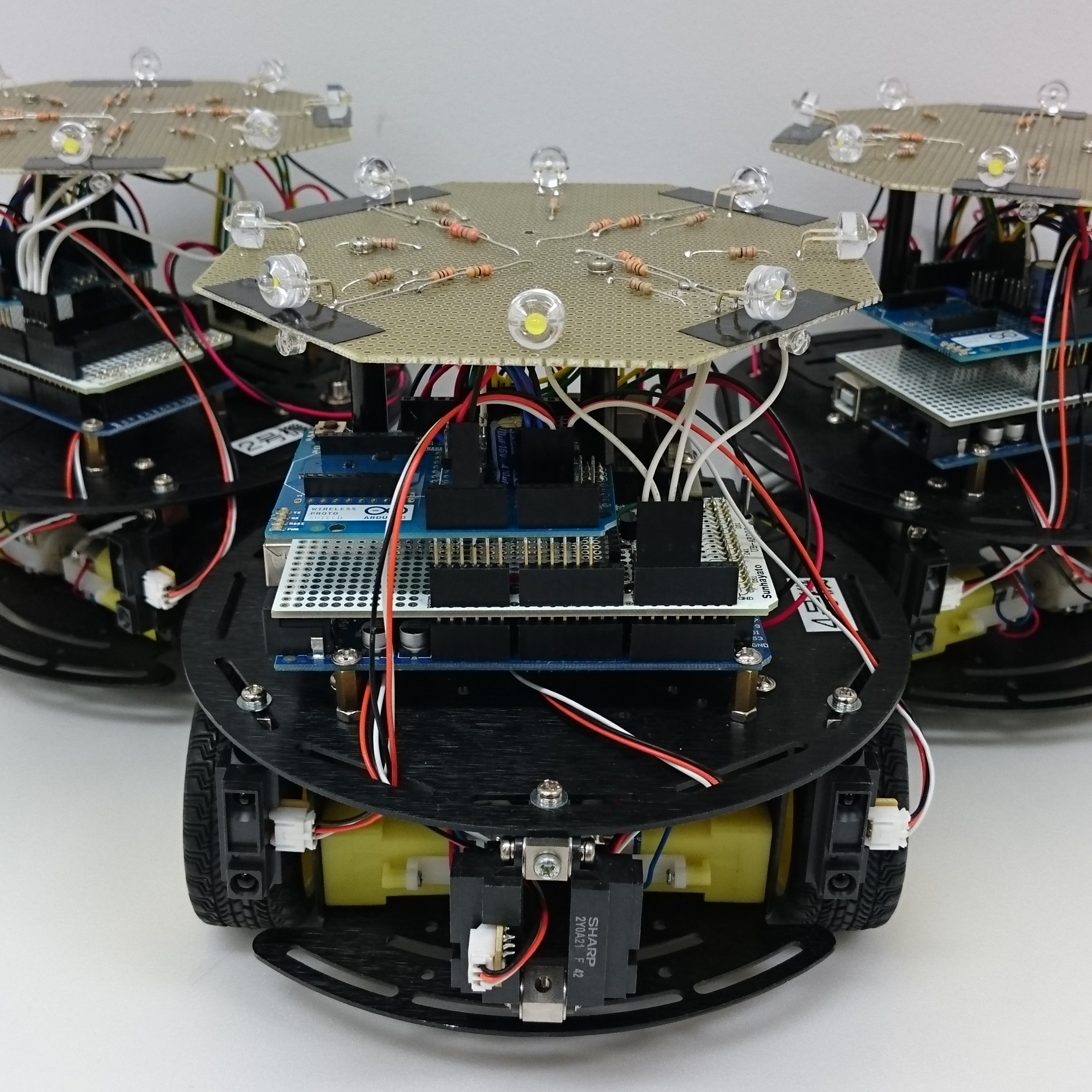
スワームロボティクス(Swarm Robotics) とよばれる分野が注目を集めています.これは単一ロボットでは問題解決が困難もしくは非効率なタスクに対して,例えば1億円するロボット1台ではなく,1台1万円で作れるロボットを100台使用して解決を試みるアプローチです. 我々の研究グループでは,協調探索に分類される,ターゲット探索をタスクとして取り扱っています.そして,スワームロボットによるターゲット探索において,移動戦略としてランダムウォークの1つであるレヴィウォークが有効であることを実機実験において確認しています. さらに,GNSSによる位置情報やSLAMとよばれる位置と地図を同時推定する技術,つまり,大域的な情報が実用レベルで利用可能になったことから,大域情報を利用する効率的な協調行動の生成についても研究しています.
ドローン(マルチコプター)の自動飛行の研究をしています.
近年,ドローンや自動運転車を物流に適用する研究が進んでいますが,実用化のためにはそれらを複数用いる配送計画を行うことが重要になります.
我々の研究室では,人工知能技術である,人工神経回路網および進化計算を用いて,複数ドローンが自動飛行する際に必要となる飛行経路の計画法について研究しています.
本研究により,複数ドローンの自動飛行が可能になり,災害対応分野での探索,建設分野での測量・点検,農業分野での生育情報取得・農薬散布に複数ドローンの展開が可能になると期待できます.



会話ロボット,IoTのインターフェースの研究をしています.とくに,不便益をキーワードとするロボット(的な)システムやGPTを用いたシステムを構築中です.