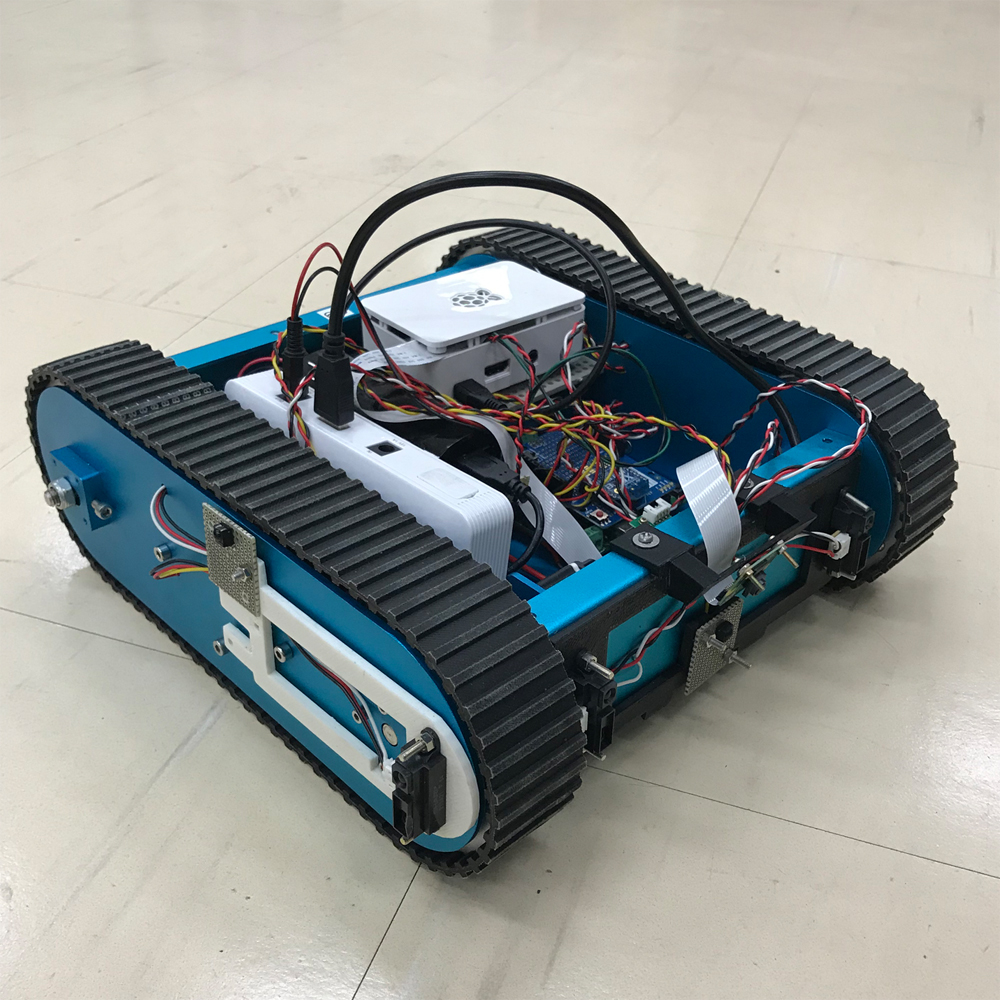
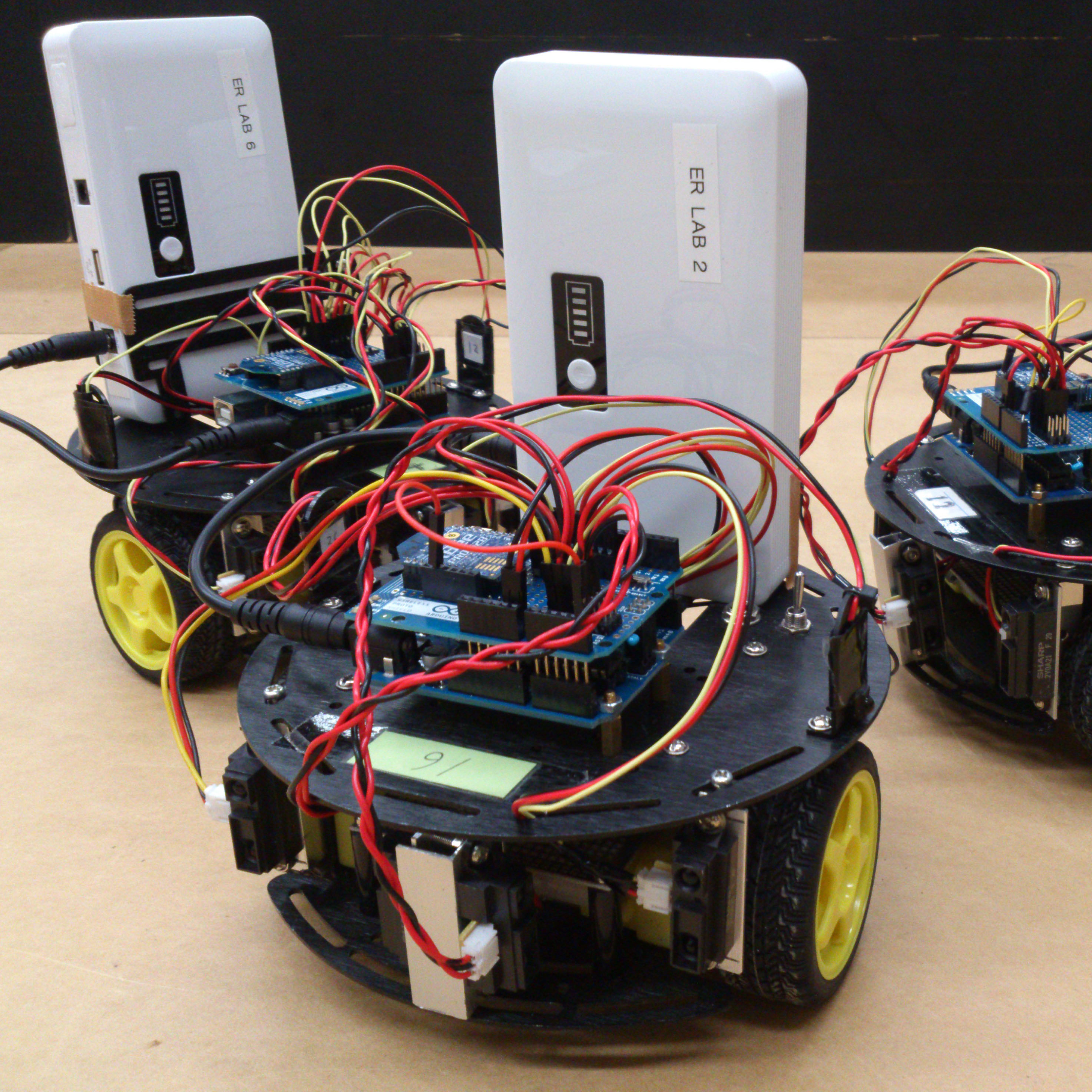
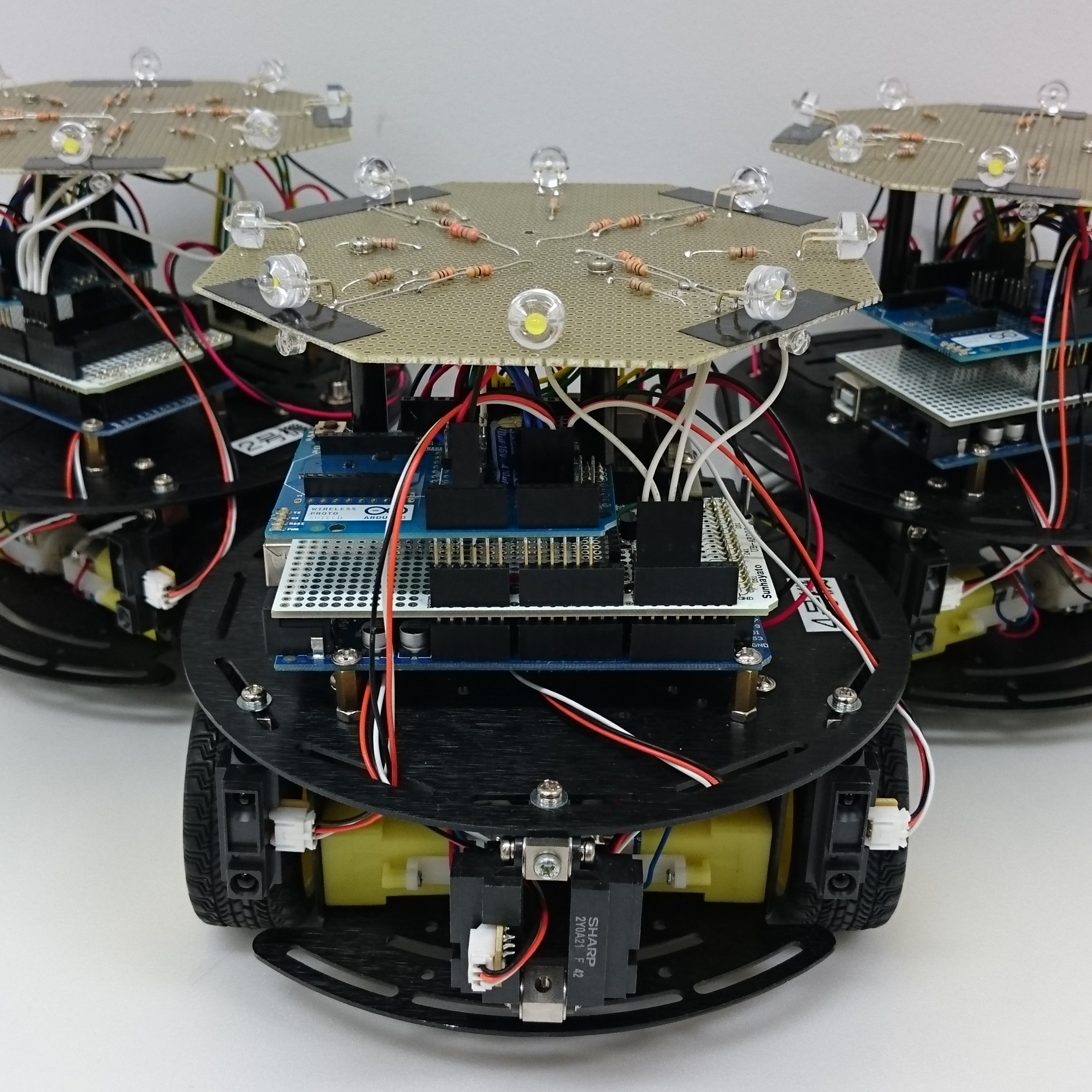
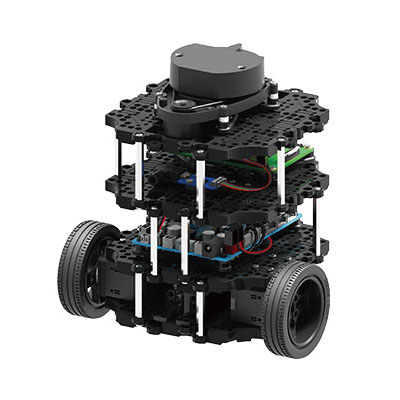
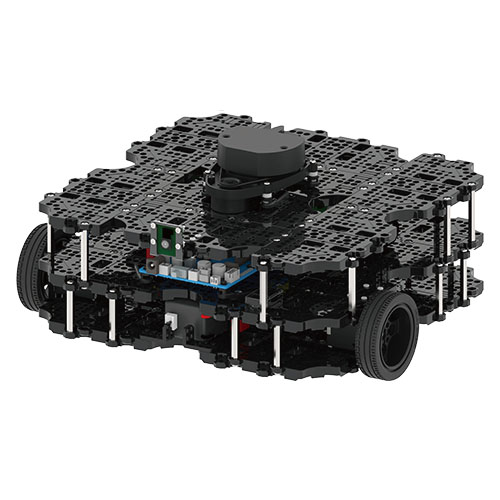
群れロボットの研究や地図作成の研究に使用するロボットです.
購入したキットをそのまま使用しているロボット,シャーシだけ購入して研究室のメンバでほぼ自作したロボットがあります.
複数ドローンの最適経路設計を行っています.計画した経路の実証実験に用います.
大学の人工芝グラウンド上で実験を行っています.飛行申請・機体申請済み






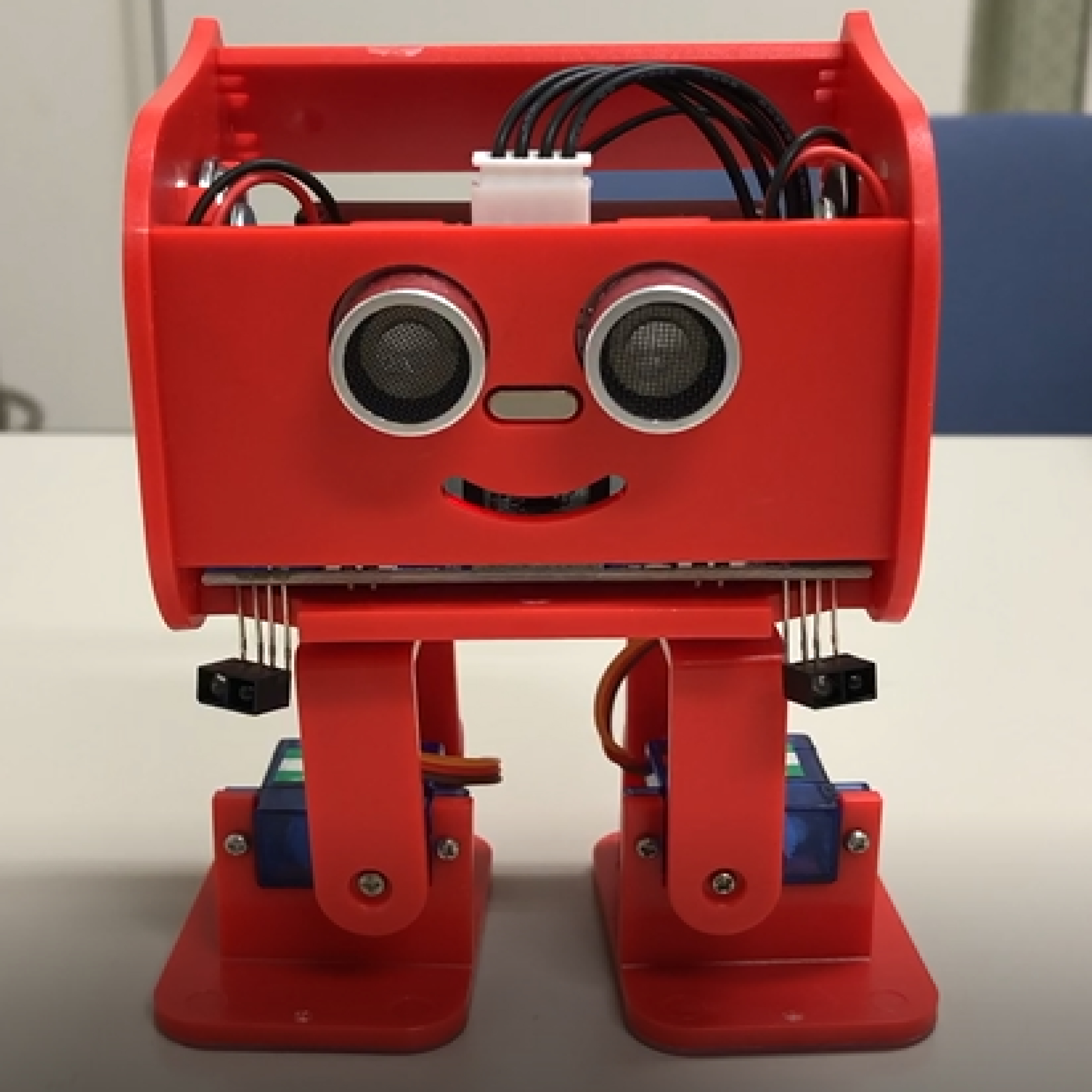
大学院の講義「知能ロボット特論」や大規模言語モデル/Python/Googleアシスタントを使った会話ロボット,IoTのインターフェースとして使用しています.3Dプリンタでオリジナルのインターフェースも作成しています.